
在实际的调节系统中,采用数字调节器往往难以达到具有同样调节规律的模拟调节器的控制效果,其误差主要来自以下几个方面。
1.采样周期的影响
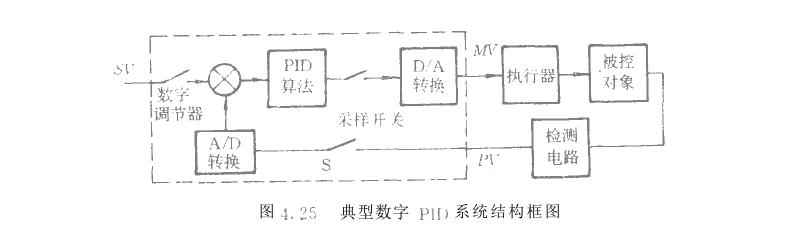
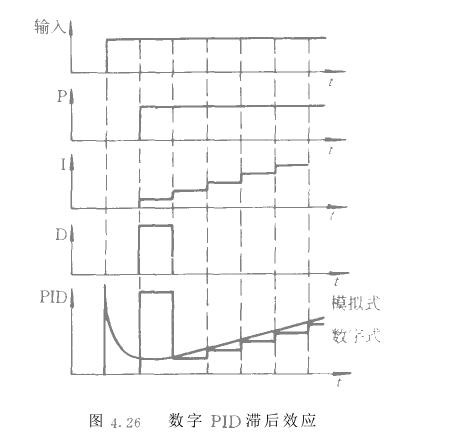
数字PID的采样周期7s主要应由过程的动态特性及干扰信号的频率决定。但对于一个特定的数字调节器来说,往往从A/D的转换速度、CPU的时钟速率、所要控制的回路数目、所要完成的计算处理的复杂程度等因素考虑,将7s取为某一定值,如SLPC(一种比s的数字调节器)的标准采样周期规定为200ms设A/D转换在每一采样周期的开始时刻进行,D/A输出在每一采样周期结束时完成,这样的数字调节器将给系统带来将近一个采样周期的滞后。以阶跃输入信号为例,数字PID的作用效果如图L 26所示。
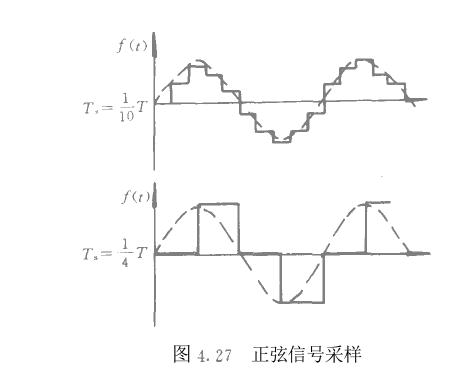
考察周期为了的正弦信号,它在不同采样周期下与采样信号的差异如图4.27所示。很显然,越大,从采样数据恢复到原始波形越困难。按照采样定理,能够不失真地从采样信号恢复原始信号的极限值为2。但这一理论值不能直接作为选择采样频率的依据,原因是在数字系统中,每一采样周期只能利用有限数目的采样数据取代原始波形。采样周期八的实际取值一般为信号最小周期的六.最大不超过其十。由图427可以看到,此时采样带来的八/2滞后时间对系统不会产生严重影响。
2.量化影响
在数字调节器中,一般采用16位定点数进行计算。除了A/D、D/A转换带来的量化误差之外,有限字长计算过程引起的量化误差,会由于不断积累而对系统产生不容忽视的影响。如果对一个时间常数较大的过程反复进行计算,当结果为负恒时,每次的输出按一。被累加,当其为正恒时,却被忽略不计,这种增量式的输出将使控制偏离理想值,对系统稳定带来不利影响。应用中为了消除这类误差,当信号很小时,就将其全部略去,如图4.28(L)所示。http://www.zhsysb.net

